多线程
1. 线程概念
1.0 可重入函数
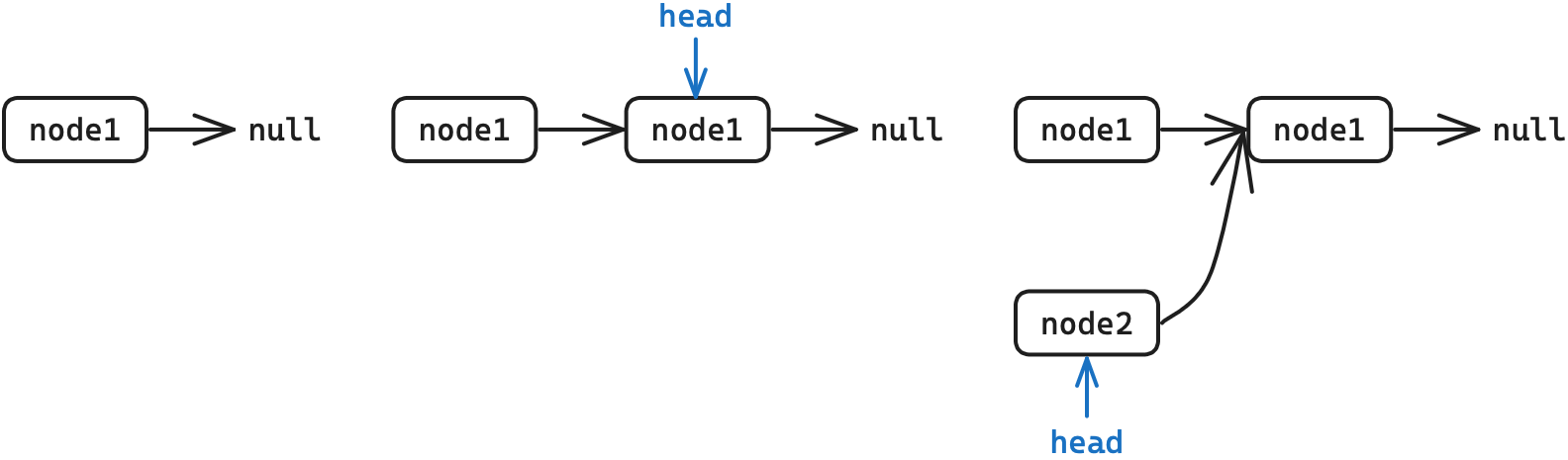
以链表头插为场景,了解一下可重入与不可重入函数的相关概念。
void sig_handler(int signum)
{
insert(&node2); //3. 信号处理方法也是头插节点
}
void insert(node* p)
{
p->next = head;//2. 语句结束后,突然收到信号,并执行信号处理方法
head = p;
}
int main()
{
insert(&node1); //1. 头插节点
}在头插中,突然收到信号并处理,处理方法是进行头插,就导致一个节点被忽略造成内存泄漏。
这并不代表代码存在问题,只是这样的代码在多执行流下可能会出现问题。
在执行时再次进入可能会造成问题,就表示该函数不能被重入,是不可重入函数。反之如果不会出现问题,则该函数就是可重入函数。
一般函数都是不可重入函数,可重入函数才是少数。一般内存或IO函数的函数都是不可重入函数。
线程安全和可重入的区别:线程安全是用来形容代码的,可重入是形容函数的。
多线程下易发生重入函数的情况,所以线程安全的函数不一定可重入,但可重入函数一定是线程安全的。
1.1 线程的定义
线程是在进程内部运行的执行分支,是进程的一部分,粒度更细更轻量化,调度成本更低。
这是比较笼统抽象的描述。如何理解进程内部、执行流、更轻量化?
将进程代码划分成多个函数模块,每个线程负责一个函数。每个线程拥有一个PCB,多个线程共享一个地址空间,共享进程的资源。
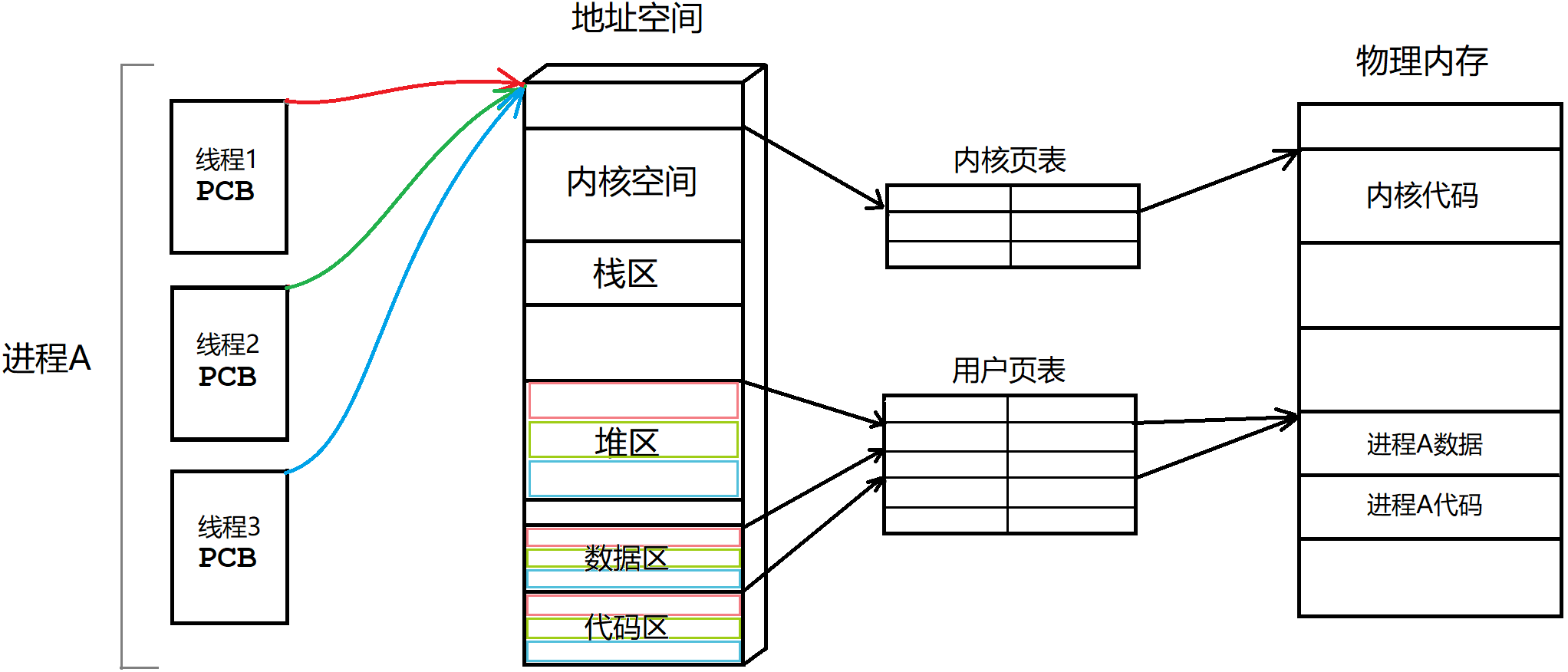
CPU不必关心PCB对应着进程还是线程,只需按部就班的执行即可。
| 概念 | 解释 |
|---|---|
| 线程在进程的内部 | 线程在进程的地址空间内运行 |
| 线程是进程的执行分支 | 线程负责进程的部分代码 |
| 线程是进程的一部分 | 多个线程组成了进程,线程占用进程的部分资源 |
| 线程更轻量化 | 线程相当于轻量版的进程,拥有单个PCB和部分地址空间 |
| 线程调度成本低 | 线程切换不需重新加载代码进缓存 |
Linux没有真正意义上的线程,Linux中线程被称为轻量级进程。
1.2 线程进程的区别
| 进程 | 线程 |
|---|---|
| 进程是代码数据和进程数据结构的总和 | 线程只占有进程的部分资源 |
| 进程是承担分配系统资源的基本实体 | 线程是CPU调度的基本单位,承担进程资源的基本单位 |
| 进程具有独立性,其资源大多都是独立的 | 线程在进程内部运行,其资源大多都是共享的 |
信号是发送给进程的,向进程发送号信号会影响所有线程。
线程的资源大多都是共享的,但也存在私有资源如pcb、独立栈结构、上下文数据。
1.3 线程的优缺点
| 优点 | 解释 |
|---|---|
| 创建成本低 | 不需要创建大部分进程数据结构,如地址空间、页表等 |
| 切换成本低 | 线程调度只要切换上下文数据。进程调度要加载进程数据结构 |
| 占用资源少 | 线程只占用部分进程数据 |
| IO等待时间重叠 | IO多数时间都在等待,故让线程等待IO的时间重叠可以适当提升效率 |
| 缺点 | 解释 |
| 健壮性降低 | 线程缺乏保护机制,线程出错可能导致进程崩溃 |
| 缺乏访问控制 | 访问某些进程共享资源可能造成冲突 |
| 编写调试难度高 | 线程可能相互影响,多线程难以定位错误 |
2. 线程控制
Linux只提供在地址空间内创建PCB并分配资源的接口。
一般使用第三方pthread库,是系统工程师在系统接口之上设计出的用户级线程库。
2.1 线程创建
#include <pthread.h>
int pthread_create(pthread_t* thread, const pthread_attr_t* attr,
void* (*start_routine) (void*), void* arg);| 参数 | 解释 |
|---|---|
| thread | 用户级线程ID(无符号整数) |
| attr | 线程属性结构体地址,一般默认为空 |
| start_routine | 线程执行函数的地址 |
| arg | 线程函数参数 |
| 返回值 | 成功返回 |
线程ID和LWP
$ ps -aL
pid LWP TTY TIME CMD
15298 15298 pts/0 00:00:00 mythread
15298 15299 pts/0 00:00:00 mythread
为什么通过
pthread_self获得编号和LWP编号不一样呢?
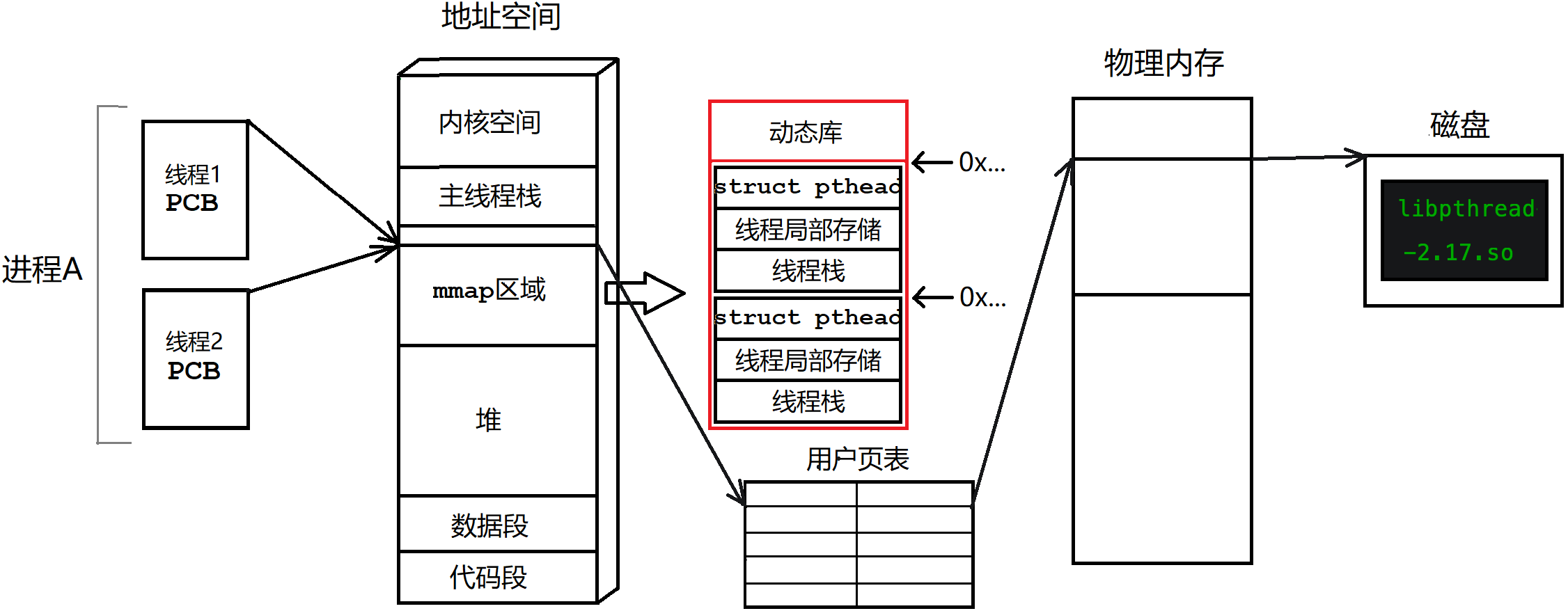
线程运行存在一些临时数据,每个线程都要有自己的私有栈结构。mmap区域用来存储线程的相关数据,包括线程结构体,线程局部数据,线程栈等。
LWP是内核中线程的编号,pthread_self的返回值是pthread库对该线程的编号,即线程结构体的地址。
2.2 线程等待
线程是进程的一个执行分支,也需要等待,否则也会出现“僵尸线程”的问题。
#include <pthread.h>
int pthread_join(pthread_t thread, void** retval);retval是输出型参数,用来获取线程退出的返回值。
线程退出只有两种结果:结果正确和结果错误。线程等待无法处理异常,处理异常是进程的任务,线程崩溃就是进程崩溃。
void* thread_run(void* arg)
{
printf("thread[%d]_id->%p\n", *(int*)arg, pthread_self());
return arg;
}
int main()
{
pthread_t tid[NUM];
for (int i = 0; i < NUM; i++)
pthread_create(tid + i, NULL, thread_run, (void*)&i);
for (int i = 0; i < NUM; i++)
{
void* retval = NULL;
pthread_join(tid[i], &retval);
}
return 0;
}2.3 线程终止
线程函数return或调用pthread_exit表示线程退出,主函数return或调用exit表示进程退出。
pthread_cancal请求终止目标线程。
#include <pthread.h>
void pthread_exit(void *retval); // 退出自身线程
int pthread_cancel(pthread_t thread); // 终止目标线程void* thread_run(void* arg)
{
printf("thread[%d]->id:%lu\n", *(int*)arg, pthread_self());
pthread_exit((void*)123);
}
int main()
{
pthread_t tid[NUM];
for (int i = 0; i < NUM; i++)
pthread_create(&tid[i], NULL, thread_run, (void*)&i);
for (int i = 0; i < NUM; i++)
{
void* retval = NULL;
pthread_join(tid[i], &retval); // pthread_cancel(tid[i]);
}
return 0;
}pthread_cancel终止线程时会主动设置线程函数的返回值为-1。如果在新线程中将主线程取消掉,那么进程将变成僵尸进程。
2.4 线程分离
线程默认需要等待否则会造成错误。如不需要等待其退出,可将该线程分离,运行结束后自动退出。线程分离本质是设置线程的状态,如果线程被分离就无法被等待。
#include <pthread.h>
int pthread_detach(pthread_t thread);void* thread_run(void* arg)
{
printf("thread[%d]->id:%lu\n", *(int*)arg, pthread_self());
pthread_detach(pthread_self());
}3. 线程安全
线程之间共享地址空间,资源大多是共享的,并发访问可能导致线程安全问题。
3.1 线程安全的概念
| 概念 | 解释 |
|---|---|
| 临界资源 | 多线程共享访问的资源就是临界资源 |
| 临界区 | 访问临界资源的代码区域就是临界区,保护临界区就是保护临界资源 |
| 互斥 | 任意时刻只允许一个执行流访问临界区 |
| 原子性 | 某件事具有原子性,意味着执行该事件的过程不会被打断,要么没执行要么执行完毕 |
| 同步 | 让能做到互斥的多执行流按顺序访问临界资源 |
3.2 线程互斥
int ticket = 10000;
void* thread_run(void* name)
{
while (ticket > 0)
{
usleep(2000); // 模拟抢票花费的时间
cout << (const char*)name << " get a ticket, " << ticket-- << endl;
}
return nullptr;
}因为进入临界区会休眠,一个线程休眠就会有线程被调度进入临界区。
等到ticket=1时,多个线程都进入了临界区休眠,之后多个线程都会对票数作--,导致票数减到0以下。
解决这个问题,需要给临界区加锁。
互斥锁的接口
#include <pthread.h>
int pthread_mutex_init(pthread_mutex_t *restrict mutex, // 创建锁
const pthread_mutexattr_t *restrict attr);
int pthread_mutex_destroy(pthread_mutex_t *mutex); // 销毁锁
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER; // 宏初始化
int pthread_mutex_lock(pthread_mutex_t *mutex); // 加锁
int pthread_mutex_unlock(pthread_mutex_t *mutex); // 解锁宏初始化的锁不需要手动销毁。已经销毁的锁,要确保后面不会有线程再使用。
struct th_data
{
string _name;
int _tickets = 1000;
pthread_mutex_t* _mtx;
th_data(const string& name, int tickets, pthread_mutex_t* mtx)
: _name(name), _tickets(tickets), _mtx(mtx)
{}
};
void* thread_run(void* args)
{
th_data* td = static_cast<th_data*>(args);
while (true)
{
pthread_mutex_lock(td->_mtx);
if (td->_tickets > 0)
{
usleep(1000);
cout << td->_name << " get a ticket " << td->_tickets-- << endl;
pthread_mutex_unlock(td->_mtx);
}
else
{
pthread_mutex_unlock(td->_mtx);
break;
}
usleep(500);
}
return nullptr;
}互斥锁的原理
int lock = 1;
// 加锁
if (lock > 0) { lock--; }
// 解锁
lock++;每个线程都能访问锁使用锁,那么锁本身也是一种临界资源。如何保证锁本身是安全的呢?
变量的自增自减,转化成汇编有三条指令:
mov $1, -4(%rbp) ;1 先将内存变量加载到寄存器中
sub $1, -4(%rbp) ;2 对寄存器中的值进行减减操作
mov $0, %eax ;3 再将该值写回到内存中实际上锁使用寄存器实现,是通过汇编指令swap,exchange一次性将寄存器和内存的数据单元进行交换。
加锁解锁
lock:
movb $0, %al // 清空线程独立数据的al寄存器
xchgb %al, mutex // 将锁数据交换到线程独立数据al寄存器中(获取锁数据 -- 竞争锁)
if (al寄存器中的值 > 0) {
return 0; // 申请锁成功
} else {
挂起等待; // 申请锁失败
}
goto lock;
unlock:
movb $1, mutex // 把1值放进内存变量mutex中
唤醒等待锁的线程;
return 0; // 解锁成功- 如果没有线程进入锁,此时锁的值为1,交换后
al=1,mutex=0,该线程得到al=1后就是竞争锁成功,可以访问临界区了。 - 再有线程申请锁,此时锁的值已经为0,交换后
al=0,mutex=0,该线程得到al=0后就是竞争锁失败,就只能挂起等待了。
在申请锁的过程中时间片到来,保存锁数据的寄存器al,作为线程上下文也会保存在线程PCB中,不会受到影响。
释放锁只要把变量mutex修改为1,再唤醒等待的线程即可。竞争锁时寄存器al的值就会被交换成1,这样就能竞争成功了。
死锁
锁被其他线程永久占用导致己方线程永久等待,称线程此时处于死锁状态。
比如线程申请一把已经被自己申请成功的锁,从而导致其他程序无法得以推进。
产生死锁的必要条件
| 条件 | 解释 |
|---|---|
| 互斥条件 | 在一段时间内某资源只由一个进程占用,其他进程若想申请只能等待。 |
| 请求与保持条件 | 一个执行流因请求资源而阻塞时,对已获得的资源保持不放。 |
| 不剥夺条件 | 一个执行流已获得的资源,在未使用完之前,不可强行剥夺。 |
| 环路等待条件 | 若干执行流之间形成一种头尾相接的环路等待资源的关系。 |
以上四种是死锁产生的必要条件,就是必须全部满足事件才可能发生死锁。
避免死锁的方法
- 破坏死锁的四个必要条件
- 加锁顺序一致
- 强制统一释放锁
- 资源一次性分配
3.3 线程同步
线程同步的概念
线程同步
在线程安全的前提下,使多线程以某种特定的顺序访问临界资源,从而有效地避免饥饿问题,就称为线程同步。
竞态条件
因为时序问题导致程序异常,我们称之为竞态条件。在多线程场景下,若不加以保护会经常出现这样的问题。
条件变量的概念
条件变量使得线程可以阻塞式等待某种条件的就绪。
- 条件变量能够通知对应的线程,临界资源是否处于就绪状态,并唤醒该线程。
- 条件变量能够避免某个线程过分强大而导致其他线程出现饥饿问题,即让并发访问具有顺序性。
条件变量的接口
#include <pthread.h>
int pthread_cond_init(pthread_cond_t *restrict cond, // 创建条件变量
const pthread_condattr_t *restrict attr);
int pthread_cond_destroy(pthread_cond_t *cond); // 销毁条件变量
pthread_cond_t cond = PTHREAD_COND_INITIALIZER; // 宏初始化
int pthread_cond_wait(pthread_cond_t *restrict cond, // 等待条件就绪
pthread_mutex_t *restrict mutex);
int pthread_cond_broadcast(pthread_cond_t *cond); // 条件就绪广播式唤醒
int pthread_cond_signal(pthread_cond_t *cond); // 条件就绪唤醒- 条件不就绪,进入
pthread_cond_wait线程阻塞住,并自动释放锁。 - 条件就绪时,
pthread_cond_wait内自动竞争锁,申请到锁的线程才会返回。 - 条件就绪时,如果只唤醒一个线程,那么其他线程仍在等待条件就绪。如果唤醒所有线程,那么所有线程都会竞争锁,其余线程都在锁处阻塞而非条件变量。
#define NUM 5
pthread_mutex_t mtx;
pthread_cond_t cond;
void* work(void* args)
{
int number = *(int*)args;
while (true)
{
pthread_cond_wait(&cond, &mtx); // 等待条件变量
std::cout << "worker: " << number << " is working..." << std::endl;
}
}
void* control(void* args)
{
std::string name = (char*)args;
while (true)
{
std::cout << name << " tell worker to work" << std::endl;
pthread_cond_signal(&cond); // 唤醒在条件变量下等待的第一个线程
sleep(2);
}
}
int main()
{
pthread_mutex_init(&mtx, nullptr); // 创建锁
pthread_cond_init(&cond, nullptr); // 创建条件变量
pthread_t worker[NUM]; // 员工线程
pthread_t boss; // 老板线程
// 创建线程
for (int i = 0; i < NUM; i++)
{
int* number = new int(i);
pthread_create(worker + i, nullptr, work, (void*)number);
}
pthread_create(&boss, nullptr, control, (void*)"boss");
// 等待线程
for (int i = 0; i < NUM; i++)
pthread_join(worker[i], nullptr);
pthread_join(boss, nullptr);
pthread_mutex_destroy(&mtx); // 释放锁
pthread_cond_destroy(&cond); // 释放条件变量
return 0;
}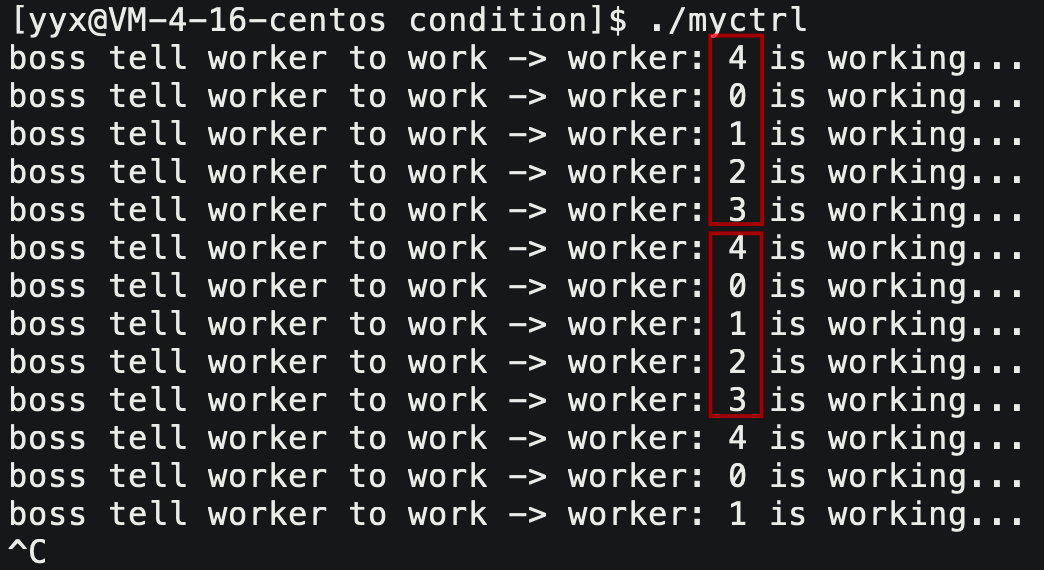
条件变量内部存在一个等待队列,让所有线程按顺序“排队”。条件就绪时,队头线程能够访问临界资源,且结束后会放入队列尾部。
信号量的概念
POSIX信号量和SystemV信号量都是用来维护同步机制,但POSIX可以用于线程间同步。
先将整个临界资源划分成的多个小资源块,信号量就是小资源块的计数器。访问临界资源得先申请信号量,申请成功就是资源可用,失败就是资源不可用。
信号量本质是临界资源的预定机制,能做到无冲突的并行访问临界资源。
互斥锁也可以认为是二元信号量。
阻塞队列每次只能访问队头数据,也就是说阻塞队列是不可拆分的临界资源,如果设计成数组就可拆分。
申请信号量P操作和释放信号量V操作。可以理解为如下伪代码,但单纯自增减不安全,所以要使用系统接口。
// 创建信号量
int count = 5;
// 申请信号量 P();
start:
if (count <= 0) {
挂起等待;
goto start;
} else {
count--;
}
// 释放信号量 V();
count++;信号量的接口
#include <semaphore.h>
int sem_init(sem_t *sem, int pshared, unsigned int value); // 创建信号量
int sem_destroy(sem_t *sem); // 销毁信号量
int sem_wait(sem_t *sem); // 申请/等待信号量
int sem_post(sem_t *sem); // 释放/发布信号量- 参数
pshared表示信号量是否需要进程间共享,不需要设为0即可。 - 参数
value代表该信号量的初始值。
4. 生产消费模型
在生活中,超市就是一个典型的生产消费模型:
- 消费者是普通人,生产者是供货商。
- 超市是交易缓冲区,将生产和消费环节”解耦“,互不影响,提高效率。
生产消费模型的效率提高关键在于解耦生产消费,能够并发构建任务和并发处理任务。而不在于数据在缓冲区的存取。
4.1 生产消费的关系
生产者和生产者、消费者和消费者、生产者和消费者,各自之间是什么关系呢?
| 含义 | 关系 | 解释 |
|---|---|---|
| 生产者和生产者 | 竞争,互斥 | 总量不变,这边收的多,那边就收的少 |
| 消费者和消费者 | 竞争,互斥 | 所有消费者都要争抢商品 |
| 生产者和消费者 | 竞争,同步 | 生产者生产完消费者购买,消费者购买完生产者再生产 |
生产消费者模型无外乎如下规律:
- 三种关系:生产者、消费者互相之间的关系;
- 两种角色:n 个生产者和 n 个消费者;
- 一个场所:交易场所“超市”,作为缓冲区,可能是一段内存空间或者是STL容器等。
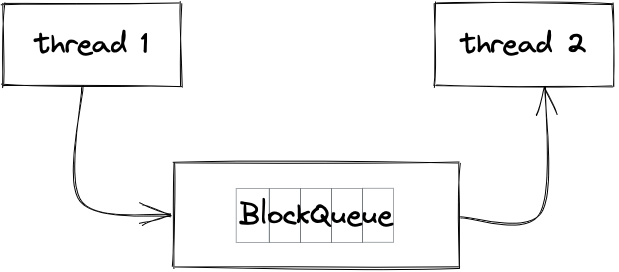
4.2 阻塞队列实现
消费者和生产者就是两批线程,所有线程都访问“超市“这个缓冲区,就是临界资源。
int deflaut_cap = 5;
template <class T>
class BlockQueue
{
private:
std::queue<T> _bq; // 阻塞队列
int _cap; // 队列元素上限
pthread_mutex_t _mtx; // 维护所有生产者和所有消费者的互斥关系,只需要一把锁,因为所有人都访问一个队列
// 生产满了就不要生产了,应该让消费者来消费;消费空了就不要消费了,应该让生产者来生产
pthread_cond_t _isFull; // 队列已满,消费者在该条件变量下等待
pthread_cond_t _isEmpty; // 队列已空,生产者在该条件变量下等待
bool IsFull() { return _bq.size() == _cap; }
bool IsEmpty() { return _bq.size() == 0; }
void LockQueue() { pthread_mutex_lock(&_mtx); }
void UnlockQueue() { pthread_mutex_unlock(&_mtx); }
// 生产者在是否为空的条件变量下等待,消费者在是否为满的条件变量下等待
void ProducerWait() { pthread_cond_wait(&_isEmpty, &_mtx); }
void ConsumerWait() { pthread_cond_wait(&_isFull, &_mtx); }
// 为满唤醒消费者,为空唤醒生产者
void WakeupConsumer() { pthread_cond_signal(&_isFull); }
void WakeupProducer() { pthread_cond_signal(&_isEmpty); }
public:
BlockQueue();
~BlockQueue();
void Push(const T& in)
{
LockQueue(); //加锁
while (IsFull()) //如果采用广播式唤醒,解锁后可能其他生产者竞争得锁,必须用while让其他生产者继续等待
ProducerWait(); //出函数必然获取到锁
_bq.push(in); // 向队列中放数据
WakeupConsumer(); // 如果先解锁在唤醒,可能导致锁被其他生产者得到,导致错误结果,尤其是在广播唤醒时
UnlockQueue();
}
void Pop(T* out)
{
LockQueue(); //加锁
while (IsEmpty())
ConsumerWait();
*out = _bq.front();
_bq.pop(); // 向队列中取数据
WakeupProducer(); // 通知生产者来生产
UnlockQueue();
}
};为了进一步建立模型,将整数替换成任务对象。
class task {
public:
task() {}
task(int x, int y, char op) : _x(x), _y(y), _op(op), _res(0), _st(NORMAL) {}
int operator()();
std::string format_expression();
std::string format_result();
private:
enum status_t {
NORMAL = 0,
ERROR,
};
private:
int _x, _y, _res, _st;
char _op;
};4.3 环形队列实现
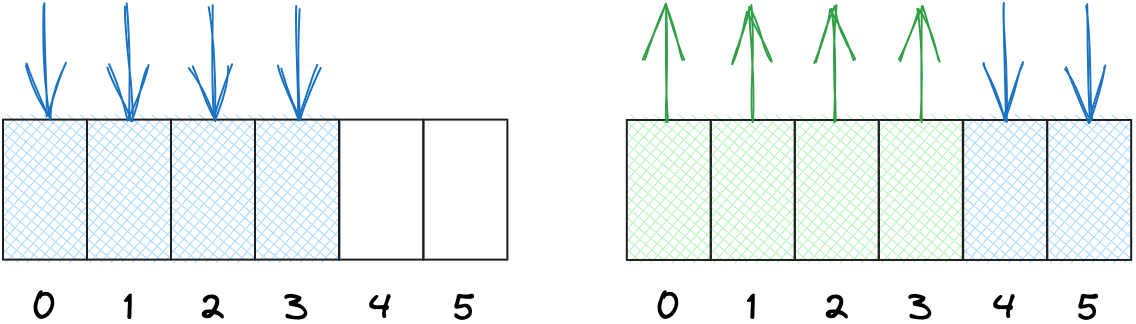
环形队列实现生产消费模型,要遵循如下逻辑:
- 为空让生产者生产,为满让消费者消费。二者没有相遇时,可并发执行生产消费。
- 生产者不可“越一圈“超过消费者,消费者不可超过生产者。
- 生产者关注空间,消费者关注数据。空间和数据就是需要控制的资源,需要两个信号量描述两种资源。
- 生产者或消费者各自之间的互斥关系用互斥锁来维护。
int g_defualt_cap = 5;
template <class T>
class LoopQueue
{
private:
std::vector<T> _q; // 循环队列
int _cap;
// 利用信号量描述资源的个数,实现同步和互斥机制,提高并发性
sem_t _blankSem; // 生产者关心的空位置资源
sem_t _dataSem; // 消费者关心的数据资源
int _cStep; // 消费者当前位置
int _pStep; // 生产者当前位置
// 维护多生产者和多消费者各自之间的互斥关系
pthread_mutex_t _cLock; // 消费者之间的锁
pthread_mutex_t _pLock; // 生产者之间的锁
public:
LoopQueue(int cap = g_defualt_cap)
: _cap(cap)
, _q(cap) {
sem_init(&_blankSem, 0, _cap);
sem_init(&_dataSem, 0, 0);
}
~LoopQueue() {
sem_destroy(&_blankSem);
sem_destroy(&_dataSem);
}
// 生产接口
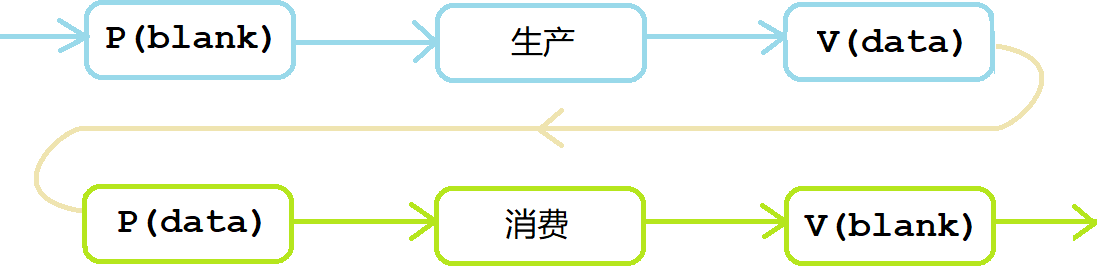
void Push(const T& in) {
sem_wait(&_blankSem); // 申请空位 P(blank)
pthread_mutex_lock(&_pLock); // 先申请信号量后加锁,提前预定资源,提高效率
// 多生产和多消费的优势在于并发地获取和处理任务
_q[_pStep++] = in; // 插入下标位置
_pStep %= _cap;
pthread_mutex_unlock(&_pLock);
sem_post(&_dataSem); // 释放数据 V(data)
}
// 消费接口
void Pop(T* out) {
sem_wait(&_dataSem); // 申请数据 P(data)
pthread_mutex_lock(&_cLock);
*out = _q[_cStep++]; // 插入下标位置
_cStep %= _cap;
pthread_mutex_unlock(&_cLock);
sem_post(&_blankSem); // 释放空位 V(blank)
}
};void* consumer(void* args) {
LoopQueue<Task>* rq = (LoopQueue<Task>*)args;
while (true) {
Task t;
rq->Pop(&t);
std::cout << "Consumer: " << pthread_self() << ", Task: ";
t.ConsumerPrintTask();
}
}
void* producer(void* args) {
LoopQueue<Task>* rq = (LoopQueue<Task>*)args;
while (true) {
Task t(rand() % 20 + 1, rand() % 10 + 1, "+-*/%"[rand() % 5]);
t();
rq->Push(t);
std::cout << "Producer: " << pthread_self() << ", Task: ";
t.ProducerPrintTask();
}
}
int main()
{
const int NUM = 5;
srand((long long)time(nullptr));
LoopQueue<Task>* rq = new LoopQueue<Task>();
pthread_t c[NUM], p[NUM];
for (int i = 0; i < NUM; i++) {
pthread_create(c + i, nullptr, consumer, (void*)rq);
pthread_create(p + i, nullptr, producer, (void*)rq);
}
for (int i = 0; i < NUM; i++) {
pthread_join(c[i], nullptr);
pthread_join(p[i], nullptr);
}
return 0;
}信号量的好处在于:不用在临界区内部作判断,就能知道资源的使用情况。使用简单方便。
循环队列生产消费需要各一把锁,这样才能让生产和消费并发执行。
5. 补充
5.2 单例模式
5.1 其他锁
乐观锁
一般常见的锁类型有:悲观锁、乐观锁、自旋锁等。
- 悲观锁:认为资源总是在被其它线程访问,所以每次访问都会给资源加锁。
- 乐观锁:认为总是没有线程在访问资源,故每次访问都不会加锁,但修改数据时会判断数据是否已被修改。
自旋锁
线程获取悲观锁失败时,会将自身挂起等待。唤醒阻塞线程是有成本的,如果等待资源耗时不长,阻塞挂起不如轮询检测资源的使用情况,以待解锁后直接竞争锁。这样的锁就叫做自旋锁。
资源的访问时间较长,就适合悲观锁,反之访问时间较短,就适合自旋锁。
#include <pthread.h>
// 初始化和销毁
int pthread_spin_destroy(pthread_spinlock_t *lock);
int pthread_spin_init(pthread_spinlock_t *lock, int pshared);
// 加锁
int pthread_spin_lock(pthread_spinlock_t *lock);
int pthread_spin_trylock(pthread_spinlock_t *lock);
// 解锁
int pthread_spin_unlock(pthread_spinlock_t *lock);6.2 读者写者模型
基本理论
读者写者模型是生产消费的变种,适用场景是:
- 临界资源的大部分操作是读取,少数操作是写入。
- 临界资源的读取操作必须只读不动。
如发布新闻,写的少读的多。
- 一个场所:一段缓冲区。
- 两种角色:读者和写者。
- 三种关系:读者和读者、写者和写者、读者和写者。
| 含义 | 关系 | 解释 |
|---|---|---|
| 写者和写者 | 互斥,竞争 | 写者不可同时写 |
| 读者和写者 | 互斥,同步 | 写者写时读者不可读,反之亦然 |
| 读者和读者 | 无关系 | 读者之间互不影响 |
#include <pthread.h>
//销毁和初始化读写锁
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock,
const pthread_rwlockattr_t *restrict attr);
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);
// 以读者身份加锁
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock);
// 以写者身份加锁
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock);
// 任意身份释放锁
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);理解读写锁
// 写者加锁伪代码
int pthread_writer_lock()
{
mtx1.lock(); // 与其他写者互斥
while (readers > 0) // 有读者在读
{
wait(cond, mtx1); // 写者挂起等待,并释放锁
}
// 没有读者读,出循环自动获得锁
//进入临界区,访问临界资源
mtx1.unlock();
}
// 读者加锁伪代码
int pthread_reader_lock()
{
mtx2.lock();
readers++;
mtx2.unlock();
// 访问临界资源
mtx2.lock();
readers--;
mtx2.unlock();
singal(cond); // 唤醒写者
}优先问题
- 读者优先:读者和写者同时到来的时候,让读者优先访问。
- 写者优先:读者和写者同时到来的时候,让比该写者晚来的所有读者都挂起等待,等待比该写者先来的所有读者全部读完时,再让写者进行写入。写者写完之后,再让读者进入。
一般读写者模型,默认都是读者优先,再加上读者多写者少,就一定存在写饥饿问题。